Der Mensch versucht in der Automation und der Robotik sich selbst zu verwirklichen. Die hier gezeigte Mechanik einer Roboterhand kommt dem ein Stück näher. Es wird gezeigt, dass durch geschickte Anwendung innovativer Getriebetechnik eine Roboterhand und sogar ein ganzer Humanoid der Bewegungsfähigkeit, Statik und der Dynamik eines Menschen nahe kommt.
Hierzu wird das Grundelement aus dem der Roboter besteht, das Gelenkmodul, erheblich mechanisch verbessert!
Somit kann mit diesem Grundelement durch geschickte Varianz und Größenmechanik ein ganzer Humanoid aufgebaut werden.
Konstruktionen aller Art
Erfahrung und Kompetenz
Faires Preis-Leistungs-Verhältnis
Erfahrung und Kompetenz
Faires Preis-Leistungs-Verhältnis

Telefon: 0049 151 1754 3441
Roboterhand

Kurzbauendes leistungsstarkes Gelenkmodul bestehend aus Encoder, Motor, Exzentergetriebe und Schneckengetriebe.
Animation des leistungsstarken Gelenkmoduls.
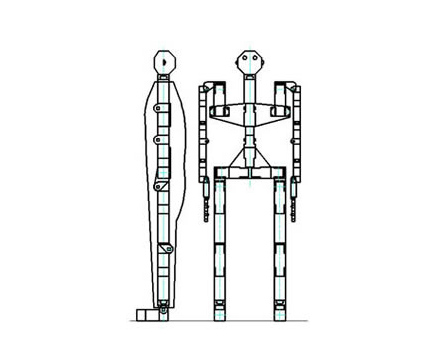
Humanoid mit veränderten Gelenkmodulen.
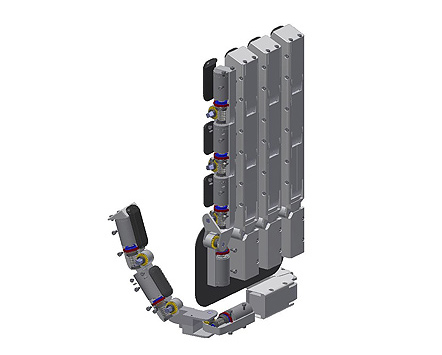
Seitenansicht der Roboterhand.

Haben Sie noch Fragen oder benötigen weitere Infos?
Wir helfen Ihnen gerne weiter. Sie können uns über unsere Kontaktseite erreichen oder tel. unter 02405 408 16 50.

Fachbericht als PDF-Datei
Bei Interesse senden wir Ihnen den gewünschten Fachbericht als PDF-Dokument zu. Nutzen Sie zur Anfrage hierzu unsere Kontaktseite.

Zum Patent angemeldet
Diese Produkt wurde zum Patent angemeldet.